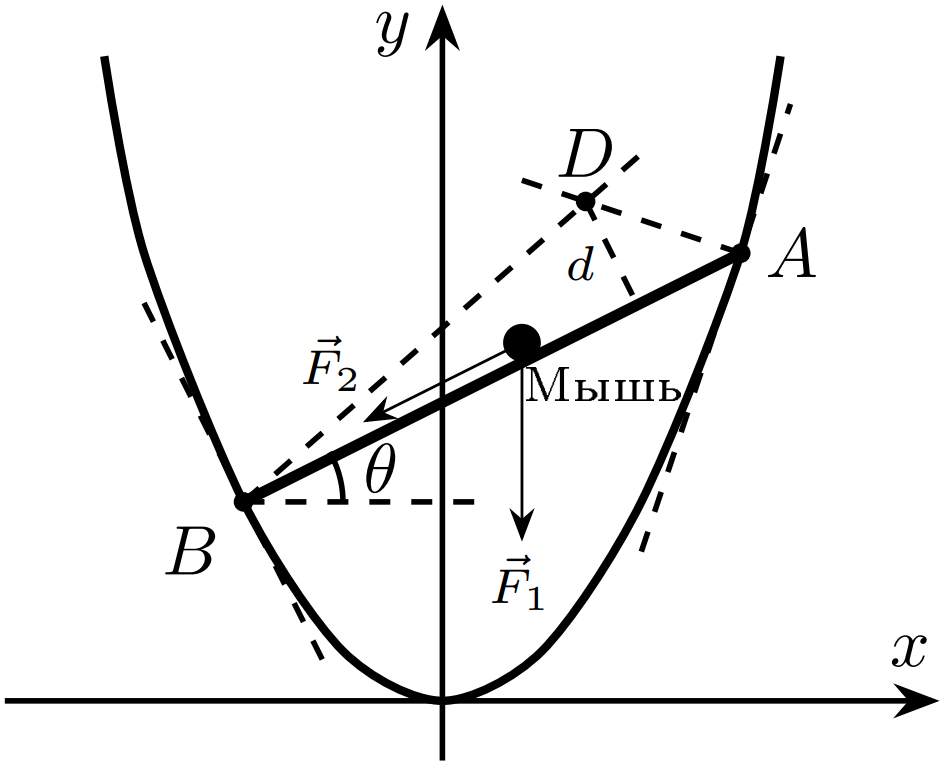
Связь координат центра стержня и его концов:\[\begin{cases}x_A=x_C+l\cos\theta\\y_A=y_C+l\sin\theta\end{cases},\quad\begin{cases}x_B=x_C-l\cos\theta\\y_B=y_C-l\sin\theta\end{cases}\]Поскольку концы стержня лежат на параболе,\[\begin{cases}y_C+l\sin\theta=a(x_C+l\cos\theta)^2\\y_C-l\sin\theta=a(x_C-l\cos\theta)^2\end{cases}\implies\begin{cases}x_C=\cfrac{\sin\theta}{2a\cos\theta}\\y_C=\cfrac{\sin^2\theta}{4a\cos^2\theta}+al^2\cos^2\theta\end{cases}\]Потенциальная энергия стержня:\[E_p=mgy_C=mg\cfrac{\sin^2\theta}{4a\cos^2\theta}+mgal^2\cos^2\theta.\]Условие равновесия стержня:\[\cfrac{\mathrm dE_p}{\mathrm d\theta}=mg\cfrac{\cos^3\theta\sin\theta+\cos\theta\sin^3\theta}{2a\cos^4\theta}-2mgal^2\cos\theta\sin\theta=mg\sin\theta\left(\frac{1}{2a\cos^3\theta}-2al^2\cos\theta\right)=0.\]Возможные положения равновесия:
Закон сохранения энергии:\[{\frac{1}{2}}m({\dot{x}_{C}^{2}+\dot{y}_{C}^{2}})+{\frac{1}{2}}I_{C}{\dot{\theta}^{2}+m g}{\frac{\sin^{2}\theta}{4a\cos^{2}\theta}}+m g a l^{2}\cos^{2}\theta=\operatorname{const}\implies\\{\frac{1}{2}}m\left[\left(\frac{1}{2a\cos^2\theta}\right)^{2}+\left(\frac{\sin\theta}{2a\cos^3\theta}-2al^2\sin\theta\cos\theta\right)^{2}\right]\dot{\theta}^{2}+{\frac{1}{6}}ml^{2}{\dot{\theta}^{2}+m g}{\frac{\sin^{2}\theta}{4a\cos^{2}\theta}}+m g a l^{2}\cos^{2}\theta=\operatorname{const}.\]Подставляем $\theta_0=30^\circ$ в кинетическую энергию и раскладываем потенциальную энергию до второго порядка по $\xi=\theta-\theta_0$:\[\frac{1}{2}m\left[\frac{1}{2a\cos^2\theta_0}\right]^2\dot\xi^2+\frac{1}{6}ml^2\dot\xi^2+\frac{mg}{2}\sin^2\theta_0\left(\frac{3}{2a\cos^4\theta_0}+2al^2\right)\xi^2=\operatorname{const}.\]Подставляя $a$ и дифференцируя по времени, получим:\[\ddot\xi+\frac{g}{l}\xi=0\implies\]
$\implies (x_D,y_D)=\left(\cfrac{\sqrt{3}}{4}l,\cfrac{13}{8}l\right)$. Уравнение самого стержня: $y-y_A=\cfrac{1}{\sqrt{3}}(x-x_A)\implies y=\cfrac{1}{\sqrt{3}}x+\cfrac{3}{8}l$. Тогда расстояние между стержнем и точкой $D$ будет равно $d=\cfrac{\sqrt{3}}{2}l$. Условие равновесия стержня принимает вид:\[m_s\ddot{s}d-m_sg(l-s)\cos\theta_0=0\implies \ddot{s}+\cfrac{g}{l}(s-l)=0\implies s=l+A\cos\left(\sqrt{\frac{g}{l}}t+\varphi_0\right).\]Поскольку мышь в начальный момент времени находилась в начале стержня и покоилась, $s(t=0)=\dot{s}(t=0)=0\implies$
Мышь доберётся до конца стержня, когда $s=2l\implies \cos\left(\sqrt{\cfrac{g}{l}}t_{\min}\right)=-1\implies$