Исследование равновесия различных механических систем представляет собой важную технологическую задачу. Например, процесс «ходьбы» (чрезвычайно сложный!) совершенно естественен. Однако при разработке человекоподобных роботов основная сложность возникает в процессе поддержания равновесия конструкции при ходьбе. Вам предлагается рассмотреть одну из простейших моделей, которая демонстрирует динамическое состояние равновесия, — маятник Капицы.
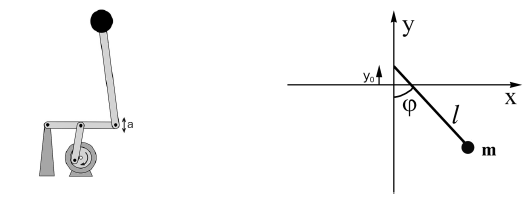
Модель состоит из физического маятника, состоящего из тела, материальной точки, массы $m$, соединенной с точкой опоры жестким невесомым стержнем длины $l$, который свободно вращается вокруг оси. В свою очередь ось может совершать колебания в вертикальном направлении амплитуды $a\ll l$ и очень большой частоты $\omega$, т.е. $y_0(t)=a\cos\omega t$. Возможная практическая реализация этого представлена на рисунке слева, обозначения приведены на рисунке справа (угол, который стержень составляет с вертикалью обозначим $\varphi$). Ускорение свободного падения равно $\vec g=-g\vec j$.
$$
\cfrac{d^2\varphi}{dt^2}=-\cfrac{1}{l}(g-a~\omega^2\cos \omega t)\sin \varphi.
$$
При определенных условиях для малых значений амплитуды $a$ и больших значений частоты колебаний оси $\omega$ решение уравнения из пункта A5 демонстрирует особое поведение: движение ведет себя как суперпозиция двух компонент: $\gamma$, которая медленно изменяется во времени и имеет большую амплитуду, и второй компоненты $\beta$, которая быстро меняется со временем и имеет небольшую амплитуду.
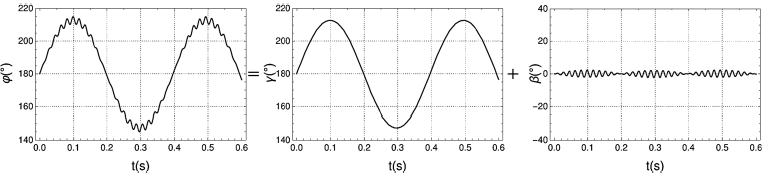
Таким образом можно разложить $\varphi=\gamma+\beta$, где $\gamma\gg\beta$ и значение медленной компоненты $\gamma$ можно считать постоянным для достаточного числа периодов быстрой компоненты $\beta$.
Теперь перейдём в систему отсчета, связанную с точкой подвеса маятника. Во всех дальнейших пунктах все величины требуется найти в этой системе отсчета. Пренебрежения из пункта B2 справедливы здесь и в последующих пунктах задачи.