Считая, что $\alpha\ll 1$ и $\beta=\pi/3$, найдите скорость центра кольца.
В установившемся режиме равнодействующие сила и момент сил равны нулю.
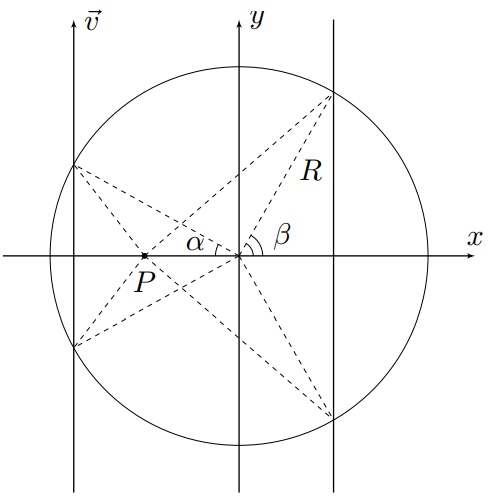
В силу симметрии установившаяся скорость центра кольца сонаправлена со скоростью первого рельса, поскольку вектор силы трения скольжения направлен против скорости относительного движения. . Тогда векторы сил трения, действующие на кольцо со стороны точек контакта с одним рельсом, симметричны относительно этого же рельса. Из этого следует, что теорема о движении центра масс в проекции на ось $x$ записывается следующим образом:
$$ma_x=k_1\mu(N_{1A}-N_{1B})+k_2\mu(N_{2A}-N_{2B})=0
$$где $\mu$ - коэффициент трения кольца о рельсы, а $k_1$ и $k_2$ - коэффициенты, зависящие от величины угловой скорости кольца и скорости его центра.
Из уравнения моментов относительно оси $x$ получим:
$$(N_{1A}-N_{1B})R\sin\alpha+(N_{2A}-N_{2B})R\sin\beta=0
$$Мы получим две равных нулю линейных комбинации $(N_{1A}-N_{1B})$ и $(N_{2A}-N_{2B})$. Это возможно, если:
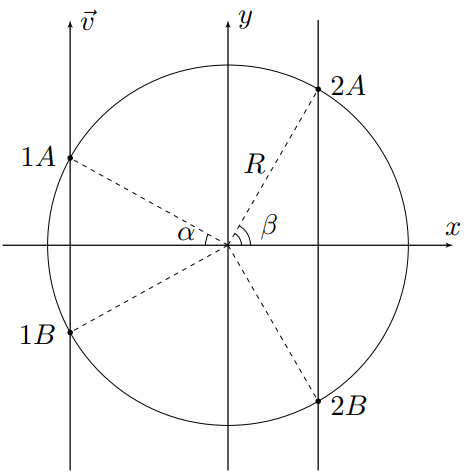
$$N_{1A}=N_{1B}=N_1\qquad N_{2A}=N_{2B}=N_2
$$Из уравнения моментов относительно оси $y$, проходящей через центр кольца вдоль рельс, получим соотношение между силами нормальных реакций рельс, и, как следствие, силами трения, действующими на кольцо:
$$2N_1R\cos\alpha=2N_2R\cos\beta\Rightarrow \cfrac{F_1}{F_2}=\cfrac{N_1}{N_2}=\cfrac{\cos\beta}{\cos\alpha}{.}
$$
Линии действия рассматриваемых пар сил трения пересекаются на прямой, проходящей через центр кольца перпендикулярно рельсам (оси $x$).
Рассмотрим уравнения моментов относительно точки пересечения линий действия одной из пар сил.
Если линии действия второй пары сил не проходят через рассматриваемую точку, то суммарный момент сил, действующих на кольцо относительно данной точки, окажется ненулевым.
Таким образом, линии действия всех четырёх сил трения пересекаются в одной точке $P$, лежащей на прямой, перпендикулярной рельсам и проходящей через центр кольца.
Предложим метод нахождения скорости центра кольца.
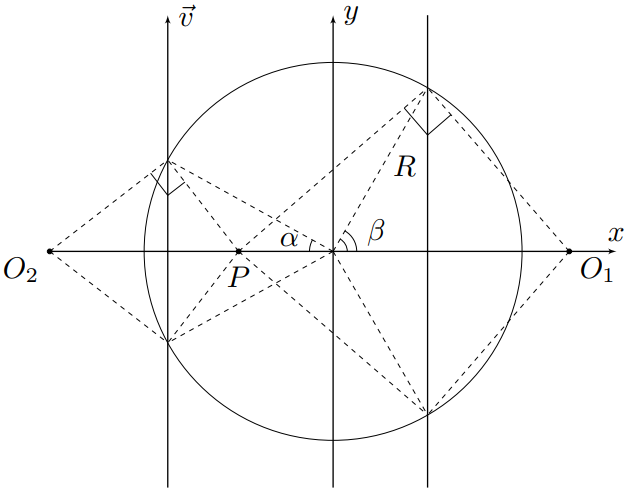
После нахождения точки $P$ восстановим мгновенные центры кольца в лабораторной системе отсчёта и в системе отсчёта первого рельса(которые обозначим за $O_1$ и $O_2$ соответственно). Для этого проведём через точки контакта кольца с рельсами перпендикуляры к направлениям сил трения. В лабораторной системе отсчёта второй рельс неподвижен, поэтому скорость точки контакта кольца направлена вдоль линии действия силы трения, а значит мгновенный центр вращения кольца расположен в точке $O_1$, показанной на рисунке. В системе отсчёта, связанной с первым рельсом, скорости точек контакта кольца направлены вдоль линий действия сил трения, поэтому в данной системе отсчёта мгновенный центр вращения кольца находится в точке $O_2$, также показанной на рисунке.
Выражения для скоростей центра кольца $O$ в данных системах отсчёта следующие:
$$\vec{v}_O=\left[\vec{\omega}\times\overrightarrow{O_1O}\right]\qquad\vec{v}_O-\vec{v}=\left[\vec{\omega}\times\overrightarrow{O_2O}\right]{.}
$$Из данной системы уравнений следует, что скорость центра кольца сонаправлена со скоростью первого рельса и равна:
$$v_O=v\cdot{\cfrac{O_1O}{O_1O_2}}{.}
$$
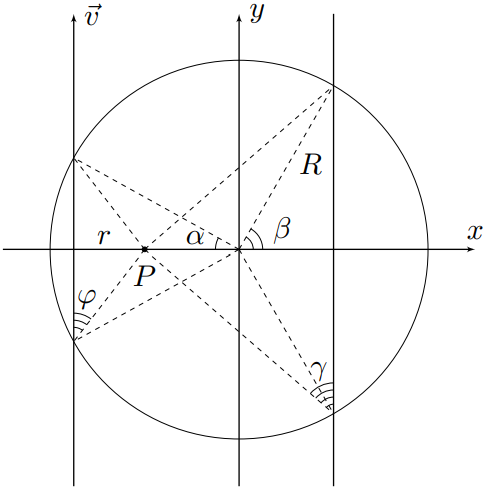
Перейдём к поиску точки $P$. Пусть расстояние от неё до первого рельса равно $r$.
Пусть углы между линиями действия сил трения и рельсами равны $\varphi$ и $\gamma$ для первого и второго рельса соответственно. Тогда из условия равенства нулю равнодействующей силы можно записать соотношение между силами трения:
$$F_1\cos\varphi=F_2\cos\gamma{.}
$$С учётом соотношения между $F_1$ и $F_2$:
$$\cos\varphi\cos\beta=\cos\alpha\cos\gamma{.}
$$Получим выражения для $\tan\varphi$ и $\tan\gamma$:
$$\tan\varphi=\cfrac{r}{R\sin\alpha}\qquad\tan\gamma=\cfrac{R\cos\alpha+R\cos\beta-r}{R\sin\beta}{,}
$$и, с учётом выражения
$$\cfrac{1}{\cos^2t}=1+\tan^2t{,}
$$имеем:
$$\cfrac{1}{\cos^2\beta}\left(1+\cfrac{r^2}{R^2\sin^2\alpha}\right)=\cfrac{1}{\cos^2\alpha}\left(1+\left(\cfrac{R\cos\alpha+R\cos\beta-r}{R\sin\beta}\right)^2\right){.}
$$
Введём величину $k=r/R$ и приведём квадратное уравнение к стандартному виду:
$$k^2\left(\tan^2\beta-\tan^2\alpha\right)+2k\tan^2\alpha\left(\cos\alpha+\cos\beta\right)+\sin^2\alpha\tan^2\beta-\sin^2\beta\tan^2\alpha-\tan^2\alpha\left(\cos\alpha+\cos\beta\right)^2=0{.}
$$Теперь учтём, что $\beta=\cfrac{\pi}{3}$ и $\alpha\ll{1}$. Разложим каждое из слагаемых до ведущего члена:
$$1){~}\tan^2\beta-\tan^2\alpha\approx{3};
$$$$2){~}2\tan^2\alpha(\cos\alpha+\cos\beta)\approx{3\alpha^2};
$$$$3){~}\sin^2\alpha\tan^2\beta-\sin^2\beta\tan^2\alpha-\tan^2\alpha\left(\cos\alpha+\cos\beta\right)^2\approx{\cfrac{9\alpha^2}{4}-\alpha^2\left(\cfrac{3-\alpha^2}{2}\right)^2}\approx{\cfrac{3\alpha^4}{2}}{.}
$$С учётом приближений перепишем квадратное уравнение компактнее и решим:
$$k^2+k\alpha^2-\cfrac{\alpha^4}{2}=0\Rightarrow{k=\cfrac{\alpha^2\left(-1\pm{\sqrt{3}}\right)}{2}}{.}
$$Корень со знаком ${-}$ не подходит, поскольку в таком случае сил трения окажутся не скомпенсированными. Отсюда:
$$k=\cfrac{\alpha^2\left(\sqrt{3}-1\right)}{2}{.}
$$Величина $r$ оказывается малой. В связи с этим положение точки $O_1$
оказывается практически на окружности. Поэтому $O_1O=R$.
Положение точки $O_2$ задаётся равенством
$$PO_2=\cfrac{r}{\sin^2\varphi}=r+\cfrac{R^2\sin^2\alpha}{r}\approx{R\left(1+\sqrt{3}\right)}{.}
$$Таким образом:
$$O_1O_2=O_1O+OP+PO_2=R\left(3+\sqrt{3}\right){,}
$$откуда ответ на вопрос задачи:
Ответ:
$$v_O=\cfrac{v}{3+\sqrt 3}
$$