$\textbf{Метод №1}$
Обозначим за $m_1$ массу большего груза, а за $m_2$ — массу меньшего. В силу нерастяжимости нити модули скоростей и ускорений, с которыми движутся грузы, равны. Будем считать, что нить не проскальзывает по блоку, поэтому
\begin{equation}
v = \omega r.
\tag{1}
\end{equation}
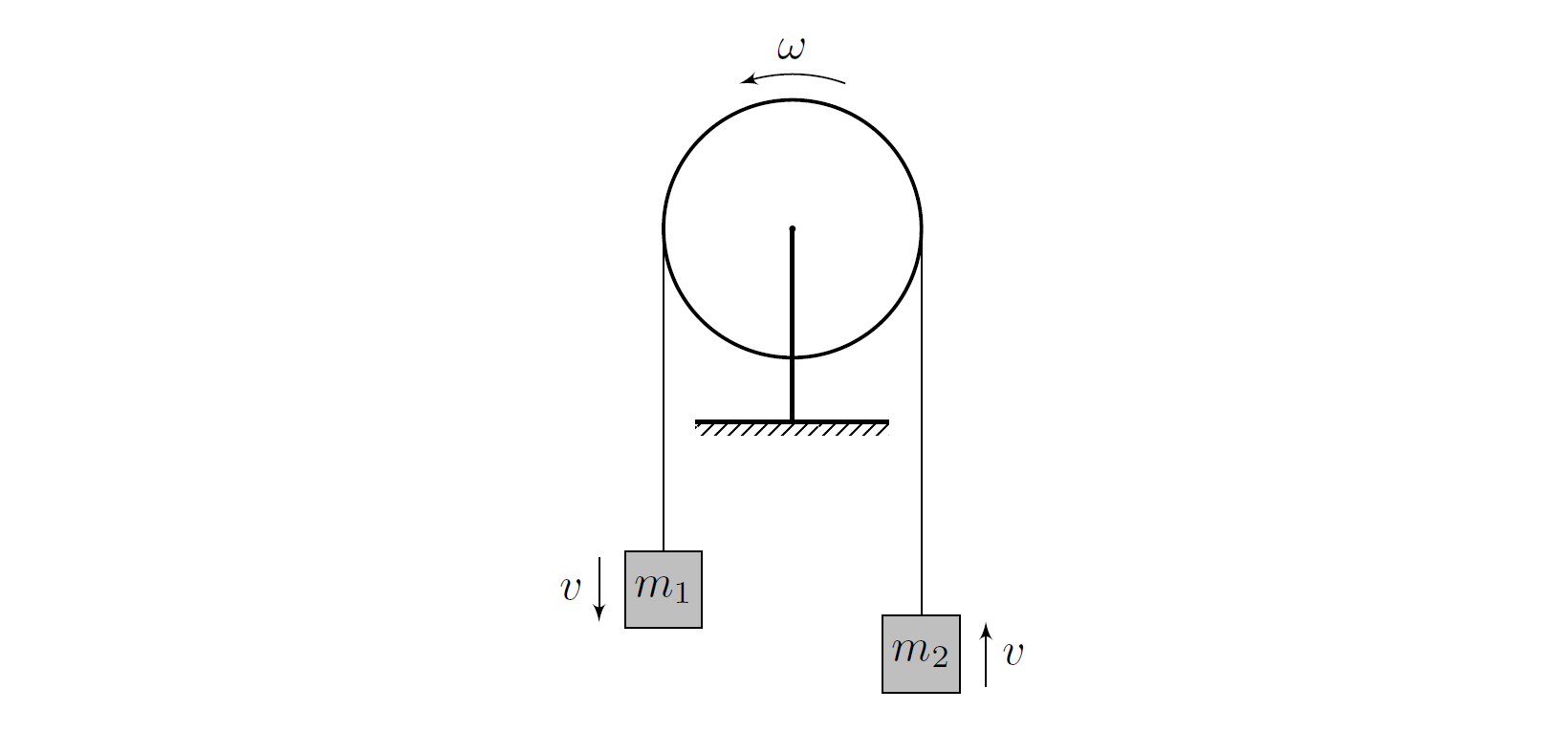
Рассмотрим систему из блока и грузов. В ней сохраняется механическая энергия, так как трением в оси блока можно пренебречь. Выберем малый промежуток времени $dt$ и, учитывая уравнение $(1)$, запишем ЗСЭ:
\[ \frac{m_1 v^2}{2} + \frac{m_2 v^2}{2} + \frac{m_\text{эфф} v^2}{2} =\\ \frac{m_1 (v + a\,dt)^2}{2} + \frac{m_2 (v + a\,dt)^2}{2} + \frac{m_\text{эфф} (v + a\,dt)^2}{2} + (m_2 - m_1) g v \, dt,\]
где $a$ – это ускорение грузов. Пренебрегая вторым порядком малости, упростив выражение, получим:
\begin{equation}
(m_1 + m_2 + m_\text{эфф}) a = (m_1 - m_2) g.
\tag{2}
\end{equation}
Проведем оценку того, при какой разнице масс $m_1$ и $m_2$ блок покоится. Например, когда $m_1=m$, $m_2=2 m_\text{с}$(с одной стороны маленькая гайка, а с другой две скрепки) — блок покоится, а когда $m_1=m+m_\text{с}$, $m_2=m$ (с одной стороны маленькая гайка, а с другой только скрепка) — блок движется. Можно сделать вывод, что блок покоится при $|m_1-m_2|<0{,}4~\text{г}$.
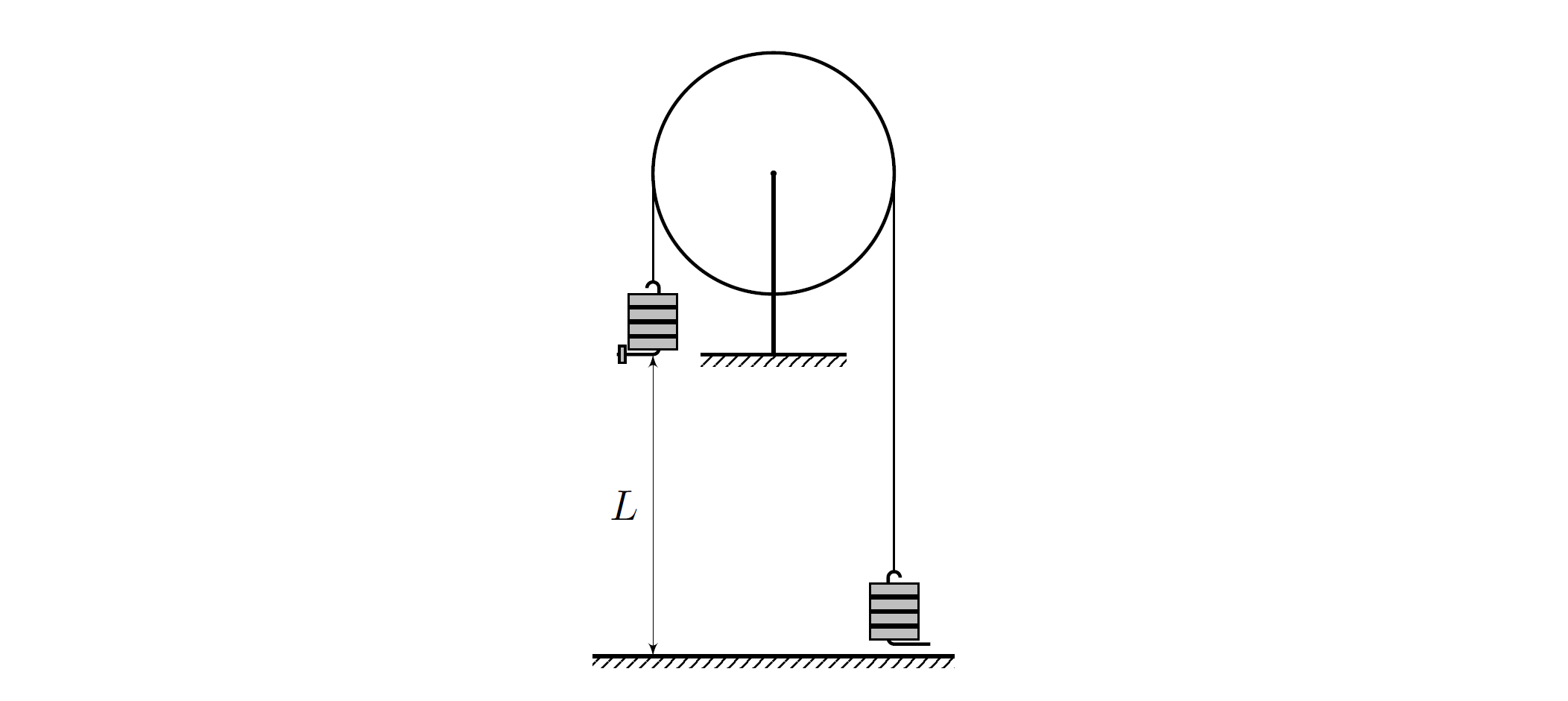
Теперь проведем следующий эксперимент: при разных $m_1$ и $m_2$ будем измерять время, за которое изначально покоящийся груз $m_1$ проходит расстояние $L$ от края стола до пола.
\[ L = (72{,}9 \pm 0{,}2)~\text{см}. \]
Массы $m_1$ и $m_2$ можно изменять подвешивая гайки на скрепки, а значения найти по формулам:
\[ m_1 = N_{1\text{б}} M + N_{1\text{м}} m + m_\text{с} \]\[ m_2 = N_{2\text{б}} M + m_\text{с}, \]
где $N_{1\text{б}}$ — количество больших гаек слева, $N_{1\text{м}}$ — количество маленьких гаек слева, $N_{2\text{б}}$ — количество больших гаек справа.
Возьмем $N_{1\text{б}}=1$, $N_{1\text{м}}=1$, $N_{2\text{б}}=1$ и три раза измерим время, за которое изначально покоящийся груз $m_1$ проходит расстояние $L$.
$t_1,~\text{c}$ $t_2,~\text{c}$ $t_3,~\text{c}$ $2{,}62$ $2{,}72$ $2{,}72$
В силу того, что приборная погрешность измерения времени гораздо меньше случайной, в дальнейшем будем проводить по 3 измерения, а ускорение $a$ считать по формуле:
\[ a = 2\frac{L}{\langle t\rangle ^2},\]
где $\langle t \rangle$ — это среднее время, которое вычисляется следующим образом: $\langle t \rangle = \dfrac{1}{3} \left( t_1 + t_2 + t_3 \right)$.
№ $N_{1\text{б}}$ $N_{1\text{м}}$ $N_{2\text{б}}$ $t_1,~\text{с}$ $t_1,~\text{с}$ $t_1,~\text{с}$ $\langle t\rangle,~\text{с}$ $X_1,~\text{г}$ $Y_1,~\text{г}$ $\Delta X_1,~\text{г}$ $\Delta Y_1,~\text{г}$ 1 0 1 0 2,22 2,20 2,10 2,17 30 2 14 0,4 2 1 1 1 2,72 2,69 2,47 2,63 44 22 20 2 3 2 1 2 2,91 3,34 3,32 3,19 65 42 29 4 4 2 2 2 2,31 2,32 2,38 2,34 70 43 17 4 5 3 1 3 3,72 3,78 3,65 3,72 89 62 38 6 6 3 2 3 2,63 2,47 2,69 2,60 87 63 21 6 7 3 3 3 2,09 2,00 1,96 2,02 78 64 15 6 8 4 1 4 4,82 4,41 4,78 4,67 140 82 60 8 9 4 2 4 3,03 2,91 2,90 2,95 112 83 25 8 10 4 3 4 2,38 2,37 2,41 2,39 110 84 18 8 11 4 4 4 2,22 2,03 2,07 2,11 114 85 18 8 12 5 1 5 5,50 5,44 5,47 5,47 192 102 81 10 13 5 2 5 3,34 3,38 3,37 3,36 145 103 32 10 14 5 3 5 2,84 2,68 2,75 2,76 147 104 24 10 15 5 4 5 2,31 2,28 2,37 2,32 138 105 19 11 16 5 5 5 2,03 2,03 2,12 2,06 136 106 17 11
Согласно выражению $(2)$ можно выбрать координаты $Y_1 = m_1 + m_2$, $X_1 = \dfrac{g}{a} (m_1 - m_2)$, в которых график должен оказаться линейным: $Y_1 = X_1 - m_\text{эфф}$. Формула для пересчета:
\[ X_1=\frac{g\langle t \rangle ^2}{2L} (m_1 - m_2). \]
При построении графика точки №8 и №12 мы не будем использовать, так как они имеют слишком большие погрешности в сравнении с другими точками. При этом важно отметить, что в рамках крестов ошибок эти точки лежат на нашей прямой.
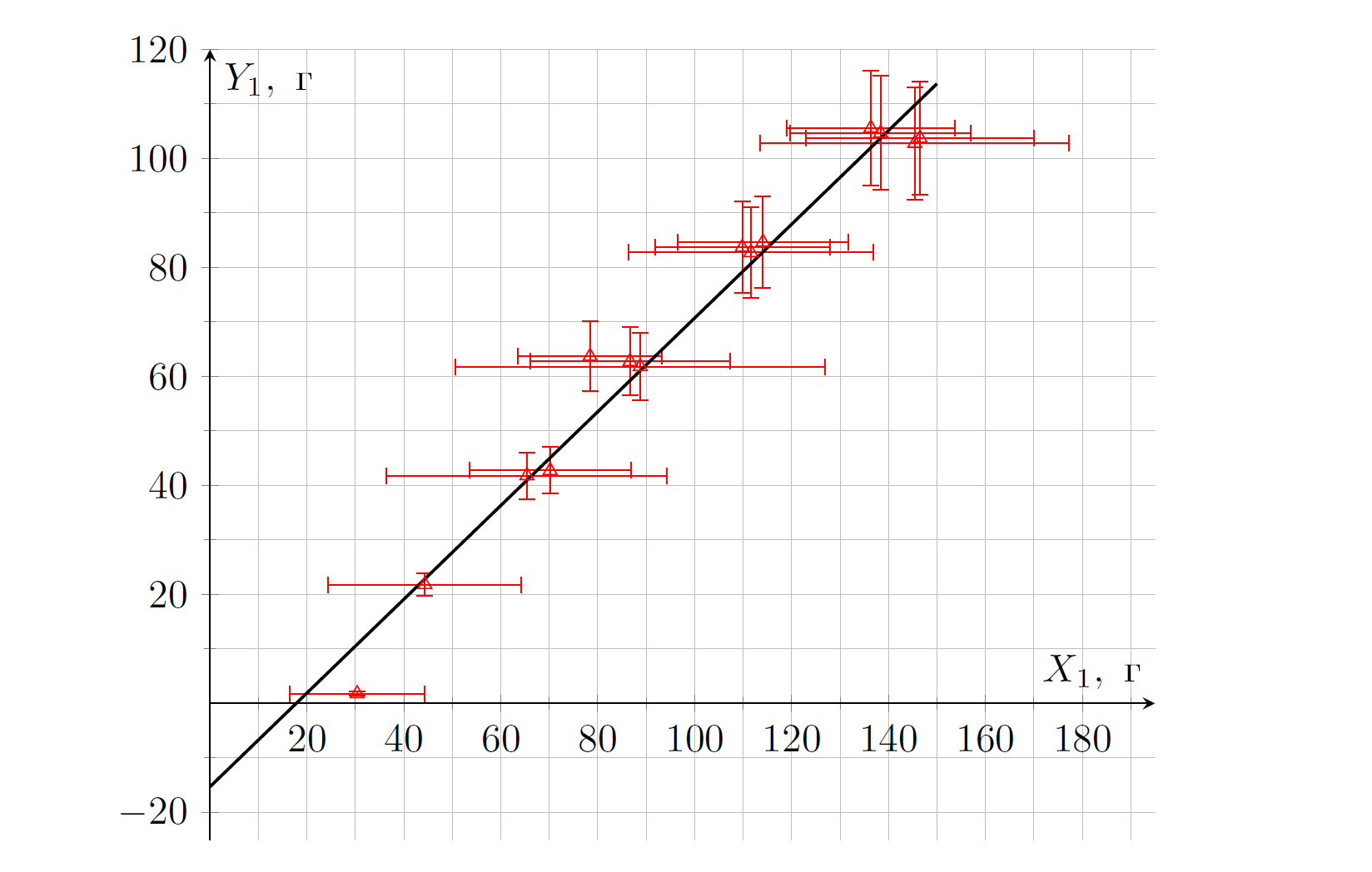
Найдем из графика $m_\text{эфф}= (15 \pm 5)~\text{г}$. Стоит отметить, что коэффициент наклона немного отличен от единицы, что можно объяснить трением в подшипнике.
$\textbf{Метод №2}$
Для определения $m_\text{эфф}$ можно использовать колебания. Чтобы превратить блок в физический маятник, мы можем с помощью клейкой массы приклеить большую гайку к краю блока. Расстояние от центра блока до гайки обозначим за $l$.
Запишем ЗСЭ, пренебрегая трением. За $\alpha$ обозначим малый угол отклонения от положения равновесия:
\begin{equation}
\frac{m_\text{эфф} \omega^2 r^2}{2} + \frac{M \omega^2 l^2}{2} + Mgl (1-\cos \alpha) = \text{const},
\tag{3}
\end{equation}
при этом $d \alpha = \omega \, dt$, $\cos \alpha \simeq 1 - \alpha^2/2$. Подставим это в выражение $(3)$:
\[ \frac{1}{2} \left( m_\text{эфф} r^2 + M l^2 \right) \omega^2 + \frac{1}{2} Mgl \, \alpha^2 = \text{const}. \]
Получилось уравнение колебаний с периодом $T$:
\[ T = 2 \pi \sqrt{ \frac{m_\text{эфф} r^2 + Ml^2}{Mgl}}.\]
Проведем измерения: $l=(4{,}5 \pm 0{,}1)~\text{см}$, $r=(4{,}9\pm0{,}1)~\text{см}$. Измерим время $t$ за, которое происходит $n=10$ колебаний. Формула для нахождения $m_\text{эфф}$:
\[ m_\text{эфф} = M \left( \frac{T^2}{4 \pi^2}\frac{gl}{r^2} - \frac{l^2}{r^2} \right).\]
По данной формуле получается следующий результат: $m_\text{эфф}=(25 \pm 6)~\text{г}$. Результат получается немного завышеным из-за трения в подшипнике.
Рассмотрим нить, которая огибает карандаш радиуса $r_0$ по дуге окружности соотвествующей углу $\varphi$. Пусть сила натяжения с одной стороны равна $T_0$, а с другой $T$, причем $T_0<T$ и $T-T_0 \ll T$.
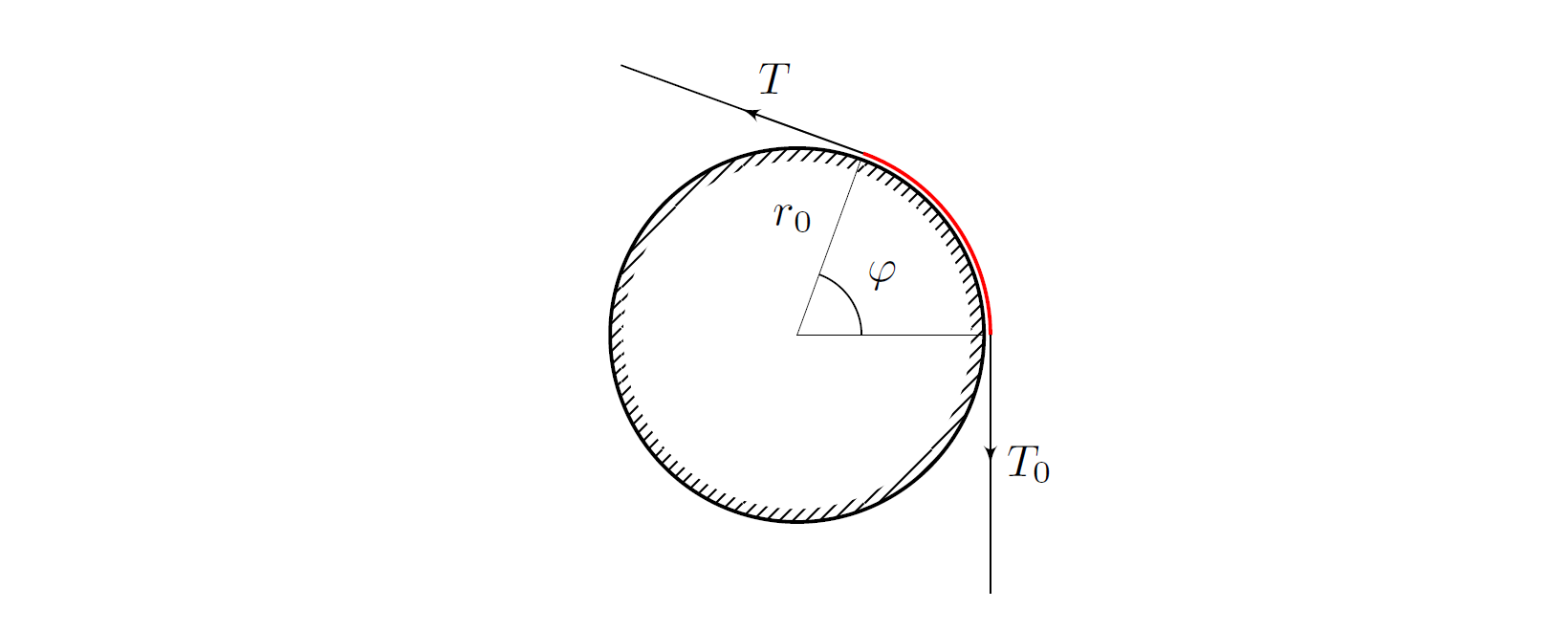
Запишем уравнения движения нити (нить невесома). Для этого рассмотрим малый участок нити — дугу окружности соответствующую малому углу $d \varphi$ и действующие на него силы.
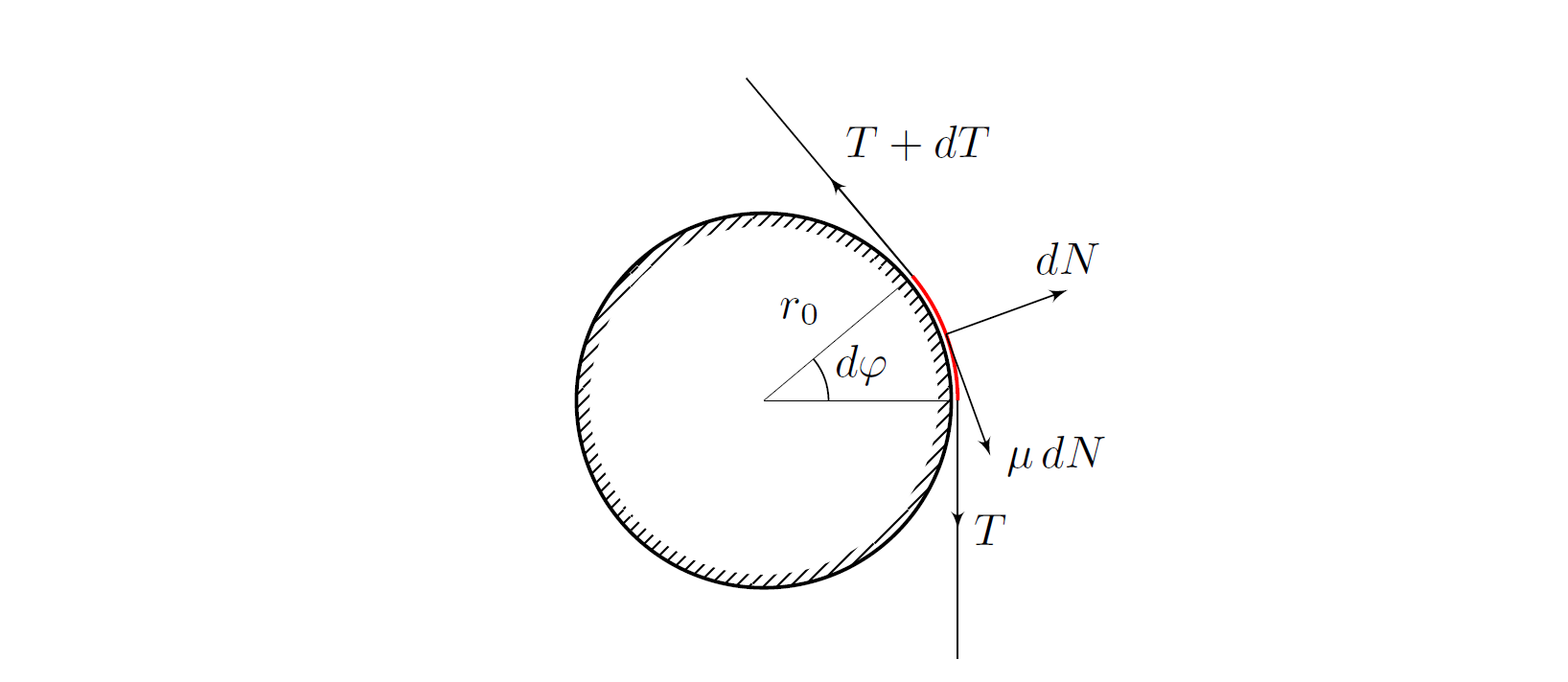
\[ d N = T \, d \varphi, \]\[ \mu \, d N \, r_0 + T r_0 = (T + d T) r_0. \]
Тогда выполняется:
\[ \mu T \, d \varphi = dT,\]
а учитывая, что $T-T_0 \ll T$:
\begin{equation}
\mu \varphi = \frac{T-T_0}{T}
\tag{4}
\end{equation}
Тот же результат можно получить используя предельный переход от точной формулы Эйлера $T = T_0 e^{\mu \varphi}$ в случае $T-T_0 \ll T$.
$\textbf{Динамический метод}$
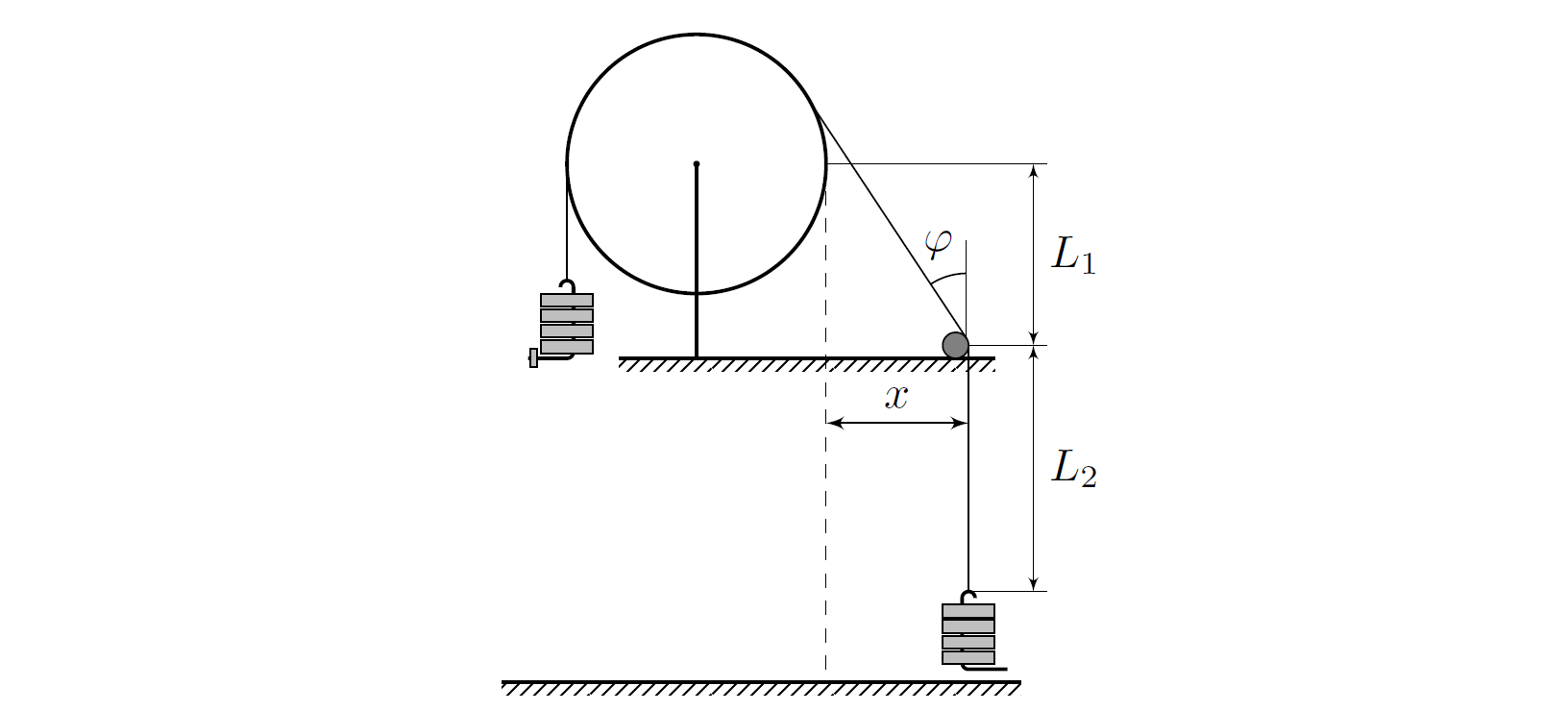
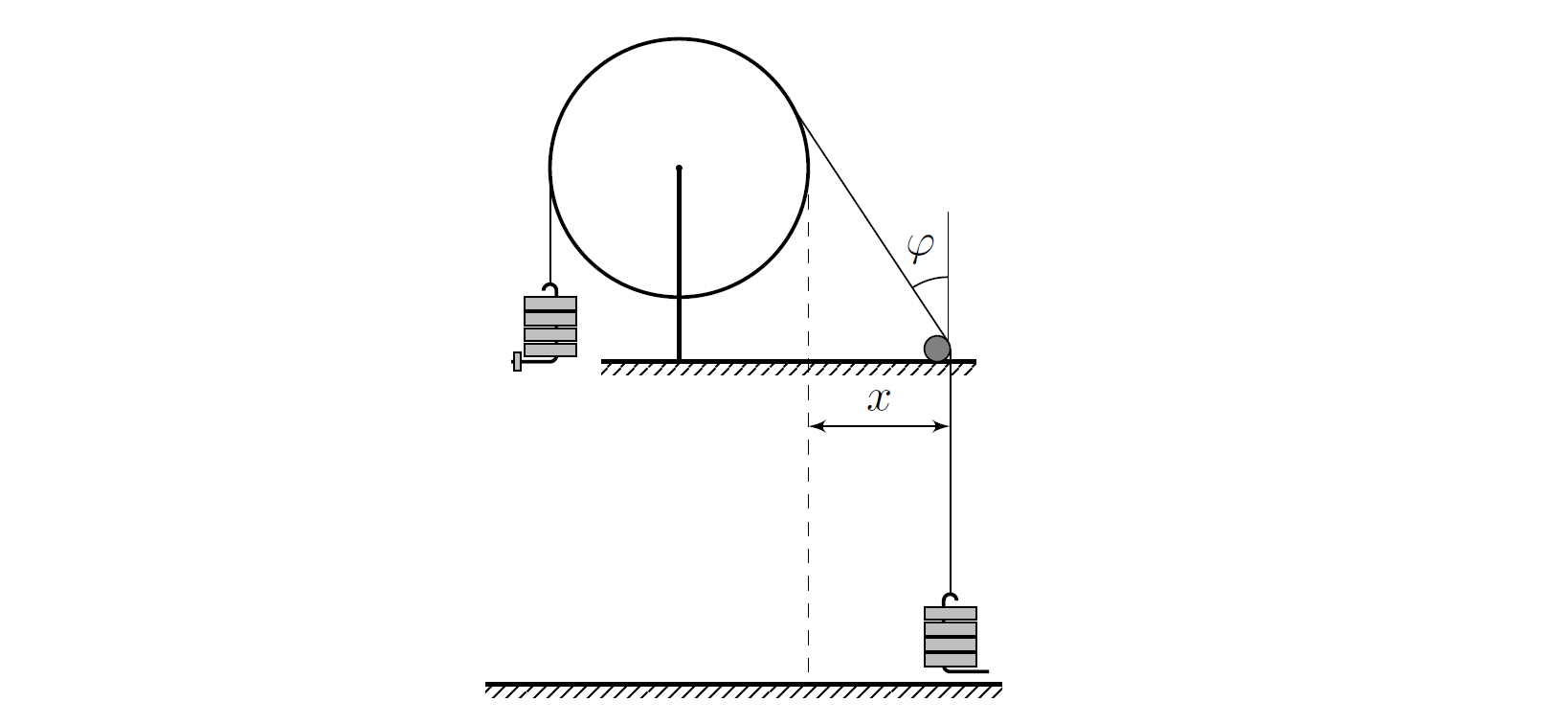
Зафиксируем $m_1 = 5M + 5m$, $m_2 = 5M$. При разных расстояниях $x$ будем измерять время $t$, за которое меньший грузик проходит расстояние $L_2=(66{,}0\pm0{,}2)~\text{см}$ от пола до карандаша.
За время $d t$ сила трения совершает работу $-(T-T_0) v \, d t$, поэтому из закона сохранения энергии и $(4)$ мы получаем:
\begin{equation}
(m_1 + m_2 + m_\text{эфф})a = (m_1 - m_2)g - \frac{m_1 + m_2}{2} \mu \varphi g.
\tag{5}
\end{equation}
Измерим расстояние $L_1=(47{,}5\pm0{,}1)~\text{см}$ от карандаша до боковой поверхности блока и радиус блока $r=(4{,}9 \pm 0{,}1)~\text{см}$. В нашем случае $\text{tg} \varphi \approx x/L_1$.
$x,~\text{см}$ $t_1,~\text{с}$ $t_2,~\text{с}$ $t_3,~\text{с}$ $\langle t \rangle,~\text{с}$ $\varphi,~\text{рад}$ $Y_2$ $\Delta \varphi,~\text{рад}$ $\Delta Y_2$ 3,60 2,00 2,19 2,12 2,10 0,073 0,070 0,004 0,007 22,40 4,72 4,47 4,69 4,63 0,436 0,014 0,004 0,001 19,60 3,56 3,78 3,35 3,56 0,378 0,024 0,004 0,003 17,90 3,44 3,31 3,50 3,42 0,348 0,027 0,004 0,002 16,00 3,41 2,97 3,22 3,20 0,313 0,030 0,004 0,004 14,50 2,87 3,06 2,90 2,94 0,286 0,036 0,004 0,003 13,50 2,78 2,91 2,91 2,87 0,267 0,038 0,004 0,003 12,20 2,82 2,90 2,69 2,80 0,242 0,039 0,004 0,004 10,60 2,53 2,57 2,53 2,54 0,211 0,048 0,004 0,003 9,30 2,32 2,47 2,28 2,36 0,186 0,056 0,004 0,005 8,20 2,37 2,37 2,09 2,28 0,164 0,060 0,004 0,008 7,30 2,32 2,00 2,07 2,13 0,147 0,068 0,004 0,009 6,40 2,19 2,28 2,19 2,22 0,129 0,063 0,004 0,005 20,30 4,03 4,09 3,94 4,02 0,390 0,019 0,004 0,001 21,40 4,31 4,09 4,00 4,13 0,409 0,018 0,004 0,002
Преобразуем выражение $(5)$:
\[ \left(1 + \frac{m_\text{эфф}}{m_1+m_2} \right) \frac{2a}{g} = 2\frac{m_1-m_2}{m_1+m_2} - \mu \varphi, \]
где $a=2L_2/\langle t \rangle^2$. Построим график в координатах $Y_2=\left(1+\dfrac{m_\text{эфф}}{m_1+m_2} \right) \dfrac{2a}{g}$ от $\varphi$. Ему соответствует линейная зависимость:
\[ Y_2 = 2\frac{m_1-m_2}{m_1+m_2} - \mu \varphi. \]
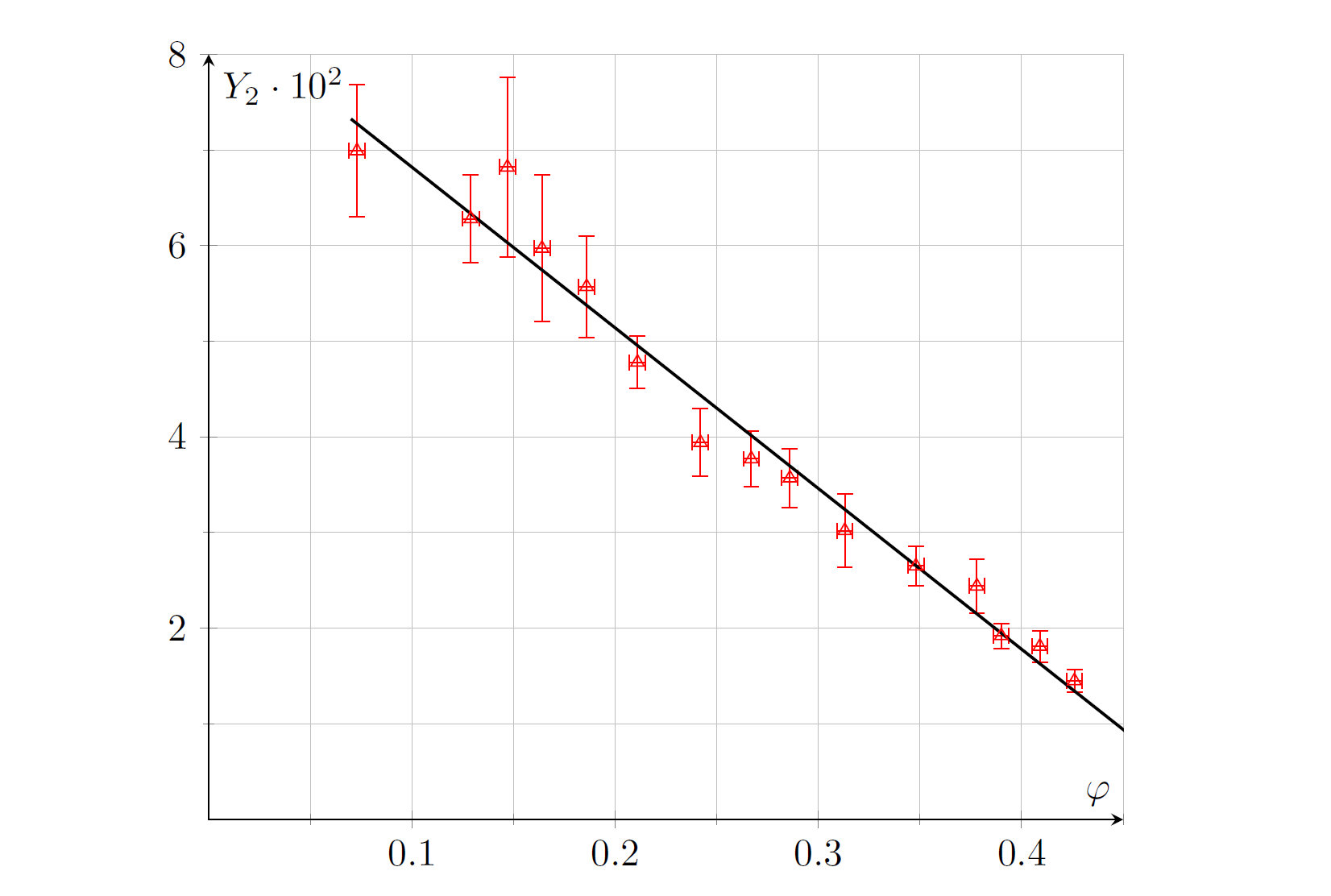
Из графика найдем угловой коэффициент $k_2 = -\mu = -(0{,}17 \pm 0{,}02)$. Значит $\mu = (0{,}17 \pm 0{,}02)$.
$\textbf{Статический метод}$
Возможен другой метод решения, точность которого хуже. Будем двигать карандаш по горизонтали, пока нить не перестанет по нему скользить, и запишем расстояние $x$, соотвествующее этому моменту. В каждом эксперименте будем использовать $m_1 = N_\text{б} M + m_\text{м} m+m_\text{с}$, $m_2 = N_\text{б} M +m_\text{с}$.
В итоге, опираясь на $(4)$, можно написать равенство:
\[ \mu\,\text{arctg} \, x/L_1 = 2\frac{m_1 - m_2}{m_1+m_2}.\]
Построим график $Y_3=2\dfrac{m_1-m_2}{m_1+m_2}$ от $\varphi$. Он должен оказаться линейным, проходить через точку $(0,0)$ и иметь угловой коэффициент $k_3=\mu$. Формулы для пересчета:
\[ \varphi = \text{arctg} \, \langle x \rangle / L_1, \quad \langle x \rangle = \frac{1}{3} (x_1 + x_2 + x_3).\]
$N_\text{б}$ $N_\text{м}$ $x_1,~\text{см}$ $x_2,~\text{см}$ $x_3,~\text{см}$ $\langle x \rangle,~\text{см}$ $\varphi,~\text{рад}$ $Y_3$ $\Delta \varphi,~\text{рад}$ $\Delta Y_3$ 5 1 9,9 11,1 7,6 9,5 0,19 0,02 0,04 0,01 5 1 9,9 11,1 7,6 9,5 0,19 0,018 0,04 0,010 5 2 12,1 12,9 13,4 12,8 0,25 0,035 0,01 0,011 5 3 22,0 18,1 19,4 19,8 0,38 0,053 0,04 0,013 5 4 29,1 28,1 29,4 28,9 0,53 0,070 0,01 0,015 5 5 44,6 41,6 40,2 42,1 0,71 0,086 0,04 0,016 5 6 50,6 49,1 49,7 49,8 0,79 0,103 0,01 0,018 4 1 7,2 9,1 8,9 8,4 0,17 0,022 0,02 0,012 4 2 17,8 17,3 17,2 17,4 0,34 0,044 0,01 0,014 4 3 29,2 28,2 25,8 27,7 0,51 0,065 0,04 0,016 4 4 40,6 40,4 37,6 39,5 0,67 0,086 0,03 0,018 4 5 52,7 52,3 51,5 52,2 0,81 0,107 0,01 0,020 3 1 12,3 13,9 9,8 12,0 0,24 0,030 0,05 0,016 3 2 20,9 19,1 22,3 20,8 0,40 0,058 0,04 0,019
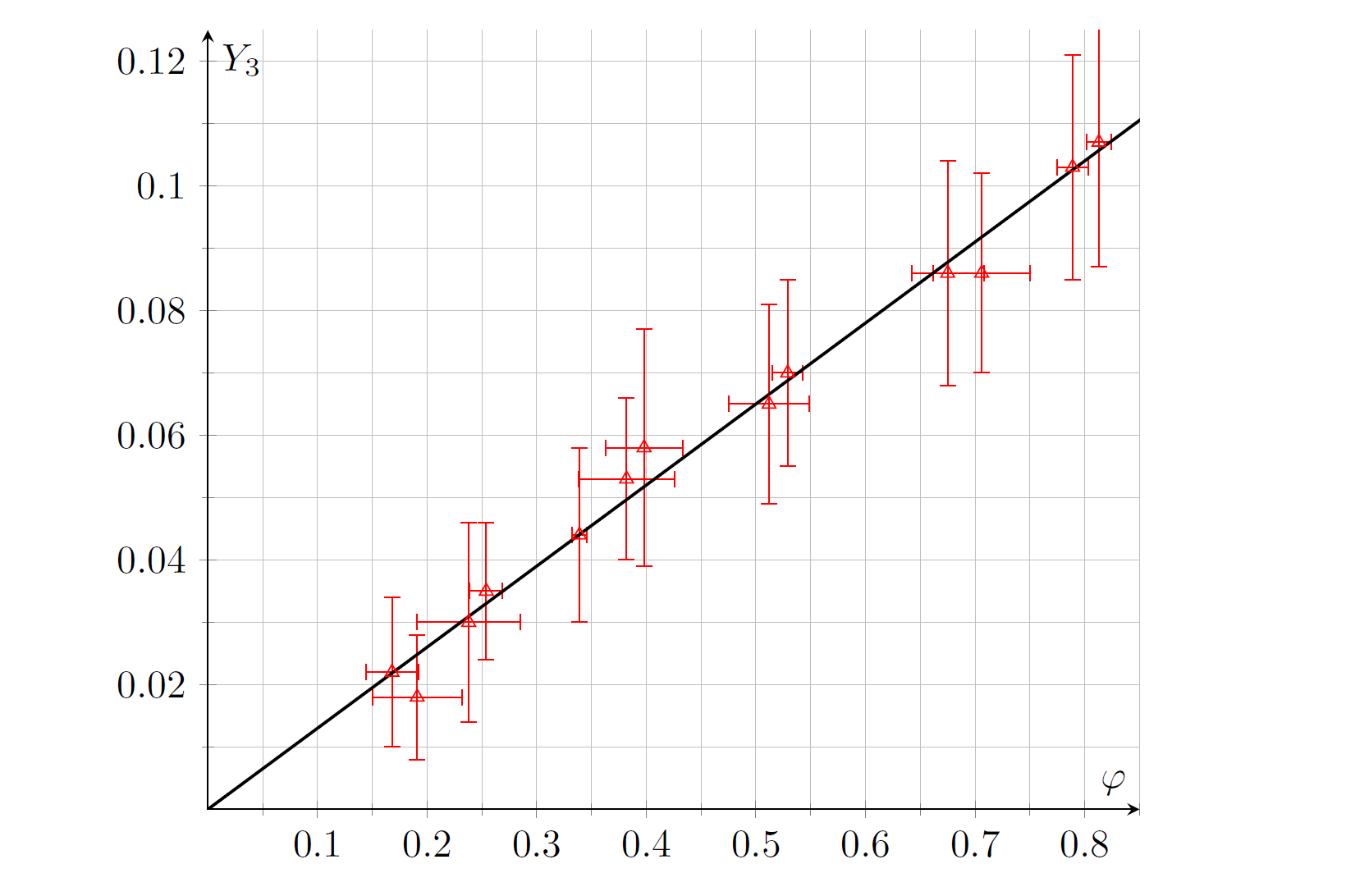
Коэффициент наклона $k_3=(0{,}13 \pm 0{,}04)$, значит $\mu=(0{,}13 \pm 0{,}04)$.