Обозначим скорость кусочка, видимого из центра кольца под углом $d \theta$ как $\vec{u}$. Так как тело движется, а коэффициент трения не зависит от направления движения, то сила трения, действующая на выбранный кусочек, направлена противоположно его скорости. Тогда её можно записать в таком виде:
$$
d \vec{F}_{fric} = - \frac{\vec{u}}{u} \mu \: dN = - \frac{(v-\omega r \sin \theta) \hat x + (\omega r \cos \theta) \hat y}{\sqrt{v^2 + (\omega r)^2 - 2 v \omega r \sin \theta}} \mu mg \: \frac{d \theta}{2 \pi}
$$
Полная сила трения получается при интегрировании выражения вдоль всего кольца, т. е. в диапазоне углов от $0$ до $2 \pi$.
Несложно заменить, что $F_{tot \: y} = 0$, так как всё выражение меняет знак при замене $\theta \rightarrow \pi - \theta$. Физически это соответствует тому, что силы, действующие на кусочки, симметричные относительно оси OX, проходящей через центр кольца, компенсируют y-составляющие друг друга.
Разделив числитель и знаменатель на $\omega r$, приходим к искомому выражению.
$$
d \vec{\tau} = \left[ \vec r \times d \vec{F}_{fric} \right] = - \frac{\left[\vec r \times \vec u \right]}{u} \mu g \: dm
$$
В векторное произведение входит только компонента $\vec u$, перпендикулярная радиусу, т. е. $u_\tau = \omega r - v \sin \theta$. подставляя всё в итоговое выражение, получим:
$$
\vec \tau = - \mu m g r\int \limits_0^{2 \pi} \frac{\omega r-v \sin \theta }{\sqrt{v^2 + (\omega r)^2 - 2 v \omega r \sin \theta}} \: \frac{d \theta}{2 \pi},
$$
откуда после сокращения на $v$ получится искомая формула.
Векторная сумма сил всегда сонаправлена скорости, поэтому $| \dot{\vec{v}} | = \dot{|v|} $, то есть тангенциальное ускорение равно нулю. Тогда уравнения движения примут вид:
$$
m \dot v = - \mu mg f \left( \frac{v}{\omega r} \right) \\
m \dot \omega r^2 = - \mu m g r f \left( \frac{\omega r}{v} \right),
$$
откуда после сокращения на $m$ и $mr$ соответственно получатся искомые равенства.
a)
$$
f(0) = \frac{1}{2 \pi} \int \limits_0^{2 \pi} -\sin \theta \: d \theta = 0 \\
f(1) = \frac{1}{2 \pi} \int \limits_0^{2 \pi} \frac{1-\sin \theta}{\sqrt{2 - 2 \sin \theta}} \: d \theta = \frac{1}{2 \pi}\int \limits_0^{2 \pi} \sqrt{\frac{1-\sin \theta}{2}} \: d \theta = \\
= \frac{1}{2 \pi}\int \limits_0^{2 \pi} \left|\sin \left(\frac{\theta}{2} - \frac{\pi}{4} \right) \right| d \theta = \frac{1}{\pi}\int \limits_0^{\pi} \sin \left( \frac{\theta}{2} \right) \: d \left( \frac{\theta}{2} \right) = \frac{2}{\pi} \\
f(\infty) = \frac{1}{2 \pi} \int \limits_0^{2 \pi} \lim \limits_{a \rightarrow \infty} \frac{a - \sin \theta}{\sqrt{1 +a^2 - 2a \sin \theta}} \: d \theta = \frac{1}{2 \pi} \int \limits_0^{2 \pi} d \theta = 1
$$
b) $$
\frac{df}{da} = \frac{1}{2 \pi} \int \limits_0^{2 \pi} \frac{\partial}{\partial a} \left[ \frac{a - \sin \theta}{\sqrt{1 +a^2 - 2a \sin \theta}} \right] \: d \theta = \\
= \frac{1}{2 \pi} \int \limits_0^{2 \pi} \left[ \frac{1}{\sqrt{1 +a^2 - 2a \sin \theta}} - \frac{(a - \sin \theta)^2}{(1 +a^2 - 2a \sin \theta)^{3/2}} \right] \: d \theta = \\
= \frac{1}{2 \pi} \int \limits_0^{2 \pi} \frac{cos^2 \theta}{(1 +a^2 - 2a \sin \theta)^{3/2}} \: d \theta > 0
$$
$$
\dot a = \frac{d}{dt} \left( \frac{v}{\omega r}\right) = \frac{\dot v \: \omega r- v \: \dot \omega r}{(\omega r)^2} = - \frac{\mu m g}{\omega r} \bigg( f(a) - a f \left(\tfrac{1}{a} \right) \bigg)
$$
Анализируя данное выражение, получаем:
$$
f(a) - a f \left(\tfrac{1}{a} \right) = \frac{1}{2 \pi} \int \limits_0^{2 \pi} \frac{a - \sin \theta - a( 1- a \sin \theta)}{\sqrt{1 +a^2 - 2a \sin \theta}} d \theta= \\
\\ = \frac{a^2-1}{2 \pi} \int \limits_0^{2 \pi} \frac{\sin \theta}{\sqrt{1 +a^2 - 2a \sin \theta}} d\theta
$$
В области отрицательных значений подынтегральной функции знаменатель больше, чем в области положительных, поэтому интеграл всегда положителен.
Таким образом:
$$
sign( \dot a) = sign(1 - a); \\ \dot a=0 \Rightarrow a =1.
$$
Заметим, что ответ можно было бы получить и из более простых логических соображений
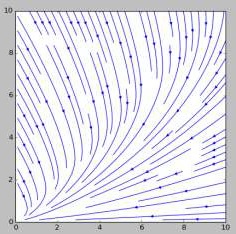
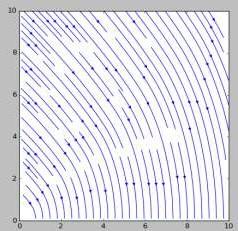
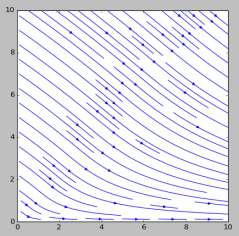
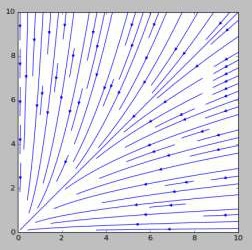
Как можно было заметить из предыдущего пункта, все траектории асимптотически стремятся к единице. При этом, $\dot v < 0$ и $\dot \omega r <0$. Приведём искомый график:
В случае отсутствия вращательного движения сила трения, действующая на каждый кусочек, направлена против оси X. Тогда:
$$
P_v = - F_{tot} v = - \mu mg \: v
$$
В случае отсутствия поступательного движения
$$
P_\omega = - \tau_{tot} \omega = - \mu mg \: \omega r
$$
Более строгие рассуждения будут приведены в пункте B5.
$$
P = \int \vec u \: \cdot \: d \vec F_{fric} = - \mu mg \: \int \limits_0^{2 \pi} \vec{u} \: \cdot \: \frac{\vec u}{u} \:\frac{d \theta }{2 \pi} = - \mu mg \: \omega r \int \limits_0^{2 \pi} \frac{u}{\omega r} \:\frac{d \theta }{2 \pi}
$$
Подставляя выражение для скорости кусочка $\vec u$:
Воспользуемся подсказкой :)
$$
E = \frac{m}{2} \Big[ v^2 + (\omega r)^2 \Big] = \frac{m}{2} (\omega r)^2 \:( a^2 + 1) \\
m \: \omega r = \sqrt{2 mE} \: \cdot \: \frac{1}{\sqrt{1 + a^2}} \\
P(a, E) = - \mu g \sqrt{2 mE} \; \cdot \int \limits_0^{2 \pi} \sqrt{1 - \frac{2a}{1 + a^2} \sin (\theta)} \: \: \frac{d \theta }{2 \pi}
$$
Анализировать последнее выражение можно несколькими способами. Например, взяв частную производную по a
$$
\frac{\partial}{\partial a} \Big( P(a, E) \Big) = \mu g \sqrt{2 mE}\; \: \frac{1 - a^2}{1+a^2} \; \cdot \int \limits_0^{2 \pi} \frac{\sin \theta}{\sqrt{1 +a^2 - 2a \sin \theta}} \frac{d\theta}{2 \pi}
$$
где интеграл в правой части совпадает с интегралом в $B2$ и имеет положительные значения при любых $a$. Так как при $a<1$ функция $P\:$ убывает, а при $a>1 - $ возрастает, то её минимум реализуется в $a_0=1$.
Из того факта, что мощность $P$ всегда отрицательна и стремится к $P \rightarrow 0$ только при $E \rightarrow 0$ очевидно, что движение может закончиться только при $E = 0$. Также, следует заметить, что движение с параметром $a = 1$ устойчиво, а значит, при $a_0 = 1$ всё движение будет происходит с минимально возможной мощностью, т. е. пройдет максимально возможное время при заданной начальной энергии $E = E_0$
Как мы выяснили в предыдущем пункте, движение, продолжающееся максимальное время происходит при $a= 1$. Тогда время можно найти из уравнения:
$$
\dot E = P(1, E) = - \mu g \sqrt{2 mE} \; \cdot \int \limits_0^{2 \pi} \sqrt{1 - \sin (\theta)} \: \: \frac{d \theta }{2 \pi}
$$
Интеграл вычисляется аналогично пункту $B1$ с помощью тригонометрической замены, указанной в условии.
$$
\int \limits_0^{2 \pi} \sqrt{1 - \sin (\theta)} \: \: \frac{d \theta }{2 \pi} = \frac{\sqrt 2}{\pi} \int \limits_0^\pi \sin \left( \frac{\theta}{2} \right) d \left( \frac{\theta}{2} \right) = \frac{2 \sqrt{2}}{\pi}
$$
Разделяя переменные, получим
$$
\int \limits_{E_0}^0 \frac{dE}{\sqrt{E}} = - \mu g \sqrt{m} \cdot \frac{4}{\pi} \int \limits_{0}^\tau dt
$$
Из чего несложно выразить ответ.
Вывод уравнения для величины силы трения и момента силы трения остаётся тем же, однако, теперь полная реакция опоры равна $N = mg \cos \alpha$. Таким образом, суммарный момент, действующий на кольцо, просто умножится на $\cos \alpha$.
С уравнениями для проекций сил, лежащих в плоскости движения немного сложнее: суммарная сила теперь не сонаправлена со скоростью кольца. Обозначив $\cos \varphi = (\widehat{\vec v , \: \vec g_{\tau}})$, где $\vec g_\tau \: -$ составляющая вектора $\vec g$, лежащая вдоль плоскости, получим уравнения:
Так как при начале движения кольцо имеет нулевую скорость $v_0 = 0$, то в предыдущем уравнении на протяжении всего движения $\cos \varphi = 0$. $\dot \omega < 0$, т.е. $\omega \rightarrow 0 $. В зависимости от величины $\tan \alpha$ возможны различные случаи: $v \rightarrow 0$, $v \rightarrow const \:$ и $v \rightarrow \infty \:$. Выбор одного из этих случаев определяется знаком $\dot v$ при $\dfrac{v}{\omega r} \rightarrow \infty$. Искомые траектории приведены на рисунках.