|
1
В радиальном направлении:
$m R \dot{\theta}^{2}=N-m g \cos (\theta)-m R \sin ^{2}(\theta) \omega^{2}$ |
0.20 |
|
|
2
В касательном направлении:
$m R \ddot{\theta}=m R \sin (\theta) \cos (\theta) \omega^{2}-m g \sin (\theta)-\operatorname{sgn}(\dot{\theta}) k N$ или $m R \ddot{\theta}=m R \sin (\theta) \cos (\theta) \omega^{2}-m g \sin (\theta)-fk N$, $f=1$ |
0.30 |
|
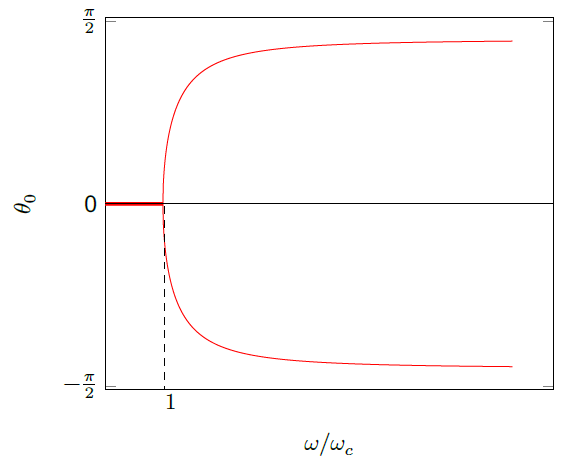
| 1 $\theta_0 = 0$ является положением равновесия при любых $\omega$ | 0.40 |
|
| 2 Уравнение на другое положение равновесия: $\cos \theta_0 = \cfrac{g}{\omega^2 R} = \cfrac{\omega_c^2}{\omega^2}$ | 0.30 |
|
| 3 Другое положение равновесия: $\theta_0 = \pm|\arccos{\cfrac{\omega_c^2}{\omega^2}}|$ | 0.10 |
|
| 4 При $\omega<\omega_c$ существует только одно положение равновесия ($\theta_0 = 0$) | 0.20 |
|
1
|
|
|
| 2 Верная форма графика | 0.20 |
|
| 3 Присутствуют обе ветви | 0.30 |
|
1
|
|
|
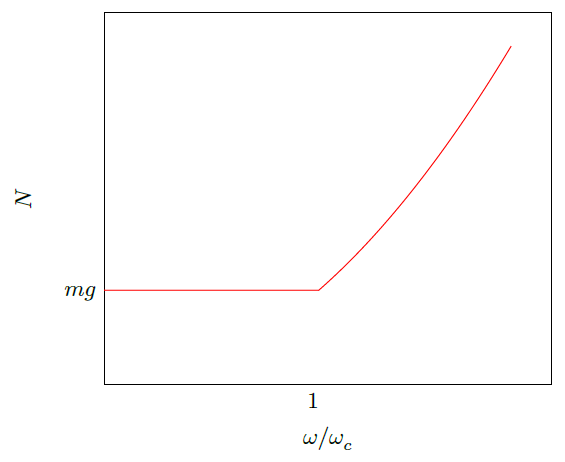
| 2 Верная ветвь при $\omega<\omega_c$ | 0.20 |
|
| 3 Рисунок неверный, но показано, что $N = mg$ при $\omega<\omega_c$ | 0.10 |
|
| 4 Верная ветвь при $\omega>\omega_c$ | 0.30 |
|
| 5 Рисунок неверный, но показано, что $N = m\omega^2R$ при $\omega>\omega_c$ | 0.10 |
|
|
1
M1
Идея интегрирования:
$V-0 = \int\limits_0^V dV = -R \int\limits_0^\theta F_\theta \, d\theta$ |
0.30 |
|
|
2
M1
Проинтегрирована сила:
$-R \int\limits_{0}^{\theta} F_{\theta} d \theta =\cfrac{m \omega^{2} R^{2}\left(\cos (2 \theta)-1\right)}{4}-m g R\left(\cos \theta-1\right)$ |
0.40 |
|
|
3
M1
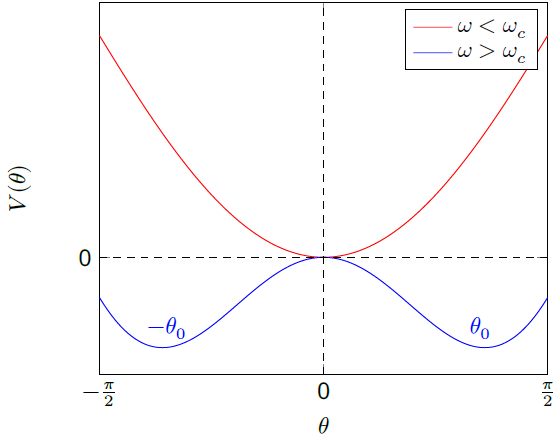
$V(\theta)=m g R\left[(1-\cos \theta)-\cfrac{\omega^{2}}{2 \omega_{c}^{2}} \sin ^{2} \theta\right]$,
т.е. $P = mgR$ $Q = -mgR$ $S = - \cfrac{\omega^2 mgR}{2 \omega_c^2}$ |
0.30 |
|
|
4
M2
Дифференцирование:
$F_{\theta}=m R \sin \theta \cos \theta \, \omega^{2}-m g \sin \theta=-\cfrac{1}{R} \cfrac{d V(\theta)}{d \theta}=\cfrac{Q}{R} \sin \theta - 2 \cfrac{S}{R} \sin \theta \cos \theta$ |
0.30 |
|
| 5 M2 $Q = -mgR$ | 0.20 |
|
| 6 M2 $S = - \cfrac{\omega^2 mgR}{2 \omega_c^2}$ | 0.20 |
|
| 7 M2 $P = mgR$ (из условия $V(0) = 0$) | 0.30 |
|
Выразите коэффициенты \(a(\omega)\) и \(b(\omega)\).
| 1 $a(\omega)=\cfrac{m g R}{2}\left(1-\cfrac{\omega^{2}}{\omega_{c}^{2}}\right)$ | 0.50 |
|
| 2 $b(\omega)=\cfrac{m g R}{6}\left(\cfrac{\omega^{2}}{\omega_{c}^{2}} - \cfrac{1}{4}\right)$ (отсутствие слагаемого $-\cfrac{1}{4}$ не наказывается) | 0.50 |
|
1
|
|
|
| 2 Кривая для $\omega<\omega_c$ (красная) | 0.50 |
|
| 3 Кривая для $\omega>\omega_c$ (синяя) | 0.50 |
|
Обозначим степень $1/2$ через $\beta$, т.е. пусть \(\mathcal{M}(T) = \mathcal{M}_0 \left(1 - \cfrac{T}{T_c}\right)^{\beta}\).
Можно сопоставить описанную теорию фазовых переходов с рассмотренной ранее механической задачей. Что в механике служит аналогом величин \(\mathcal{M}\), \(T_c\), \(T/T_c\)? Чему в механике равна \(\beta\)?
|
1
M1
В записи $\theta_{0}=\pm \sqrt{2}\left[1-\cfrac{\omega_{c}^{2}}{\omega^{2}}\right]^{1 / 2}$:
$\mathcal M \to \theta$ |
0.40 |
|
|
2
M1
$T_c \to \cfrac{1}{\omega_c^2}$,
$\cfrac{T}{T_c} \to \cfrac{\omega_c^2}{\omega^2}$ |
0.40 |
|
| 3 M1 $\beta = 1/2$ | 0.20 |
|
|
4
M2
В записи $\sin\theta_{0}=\left(1-\cfrac{\omega_{c}^{4}}{\omega^{4}}\right)^{1 / 2}$:
$\mathcal M \to \sin\theta$ |
0.40 |
|
|
5
M2
$T_c \to \cfrac{1}{\omega_c^4}$,
$\cfrac{T}{T_c} \to \cfrac{\omega_c^4}{\omega^4}$ |
0.40 |
|
| 6 M2 $\beta = 1/2$ | 0.20 |
|
|
1
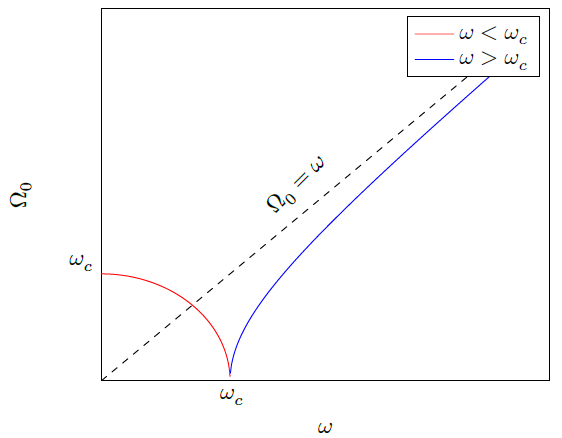
При $\omega < \omega_c$, т.е. когда колебания вокруг $\theta_0 = 0$:
$\Omega_0 = (\omega_c^2 - \omega^2)^{1/2}$ |
0.50 |
|
|
2
При $\omega > \omega_c$:
$\Omega_0 = \omega \left( 1 - \cfrac{\omega_c^4}{\omega^4} \right)^{1/2}$ |
0.50 |
|
1
|
|
|
|
2
Верная ветвь при $\omega<\omega_c$
(или верно построена по неверно полученному выражению) |
0.50 |
|
|
3
Верная ветвь при $\omega>\omega_c$
(или верно построена по неверно полученному выражению) |
0.50 |
|
| 1 $\ddot{\theta}=\omega_{c}^{2}\left[\sin \theta\,(\cos \theta-f k \sin\theta)\left(\cfrac{\omega}{\omega_{c}}\right)^{2}-\sin \theta-f k \cos \theta-f k\left(\cfrac{\dot{\theta}}{\omega_{c}}\right)^{2}\right]$ | 0.20 |
|
| 2 $\sin \theta_{0}\left(\cos \theta_{0}-f k \sin \theta_{0}\right)\left(\cfrac{\omega}{\omega_{c}}\right)^{2}=\sin \theta_{0}+f k \cos \theta_{0}$ | 0.40 |
|
|
3
$x = \theta_0 + \alpha$
$y = \theta_0$ |
0.40 |
|
| 4 Из-за алгебраической ошибки получено $x = \theta_0 - \alpha$ | -0.10 |
|
Пусть $f =1$ и $k = 0.05$.
Вычислите углы $\theta_0$ в положениях равновесия для двух случаев:
|
1
Замечено, что $k = 0.05 \ll 1$, поэтому:
$\sin \theta_0 \approx \theta_0$, $\mathrm{tg} (\theta_0 + \alpha) \approx \theta_0 + \alpha$ |
0.20 |
|
|
2
$\left(\cfrac{\omega}{\omega_{c}}\right)^{2} \approx 1+\cfrac{k}{\theta_{0}}$, поэтому:
– $\theta_0 = -0.07~\text{рад.}$ при $\cfrac{\omega}{\omega_c} = 0.50$ – $\theta_0 = -0.1~\text{рад.}$ при $\cfrac{\omega}{\omega_c} = 0.70$ |
0.30 |
|